


O Esquadrão de Helicópteros Antissubmarino 5 foi pioneiro nas operações noturnas em qualquer clima no início dos anos 1960, procurando submarinos soviéticos no Atlântico Norte
Por Dan Manningham*
Em 30 de junho de 1960, participei de uma pequena cerimônia na qual recebi minhas asas douradas da Marinha dos EUA após 18 meses de treinamento. Foi uma experiência alegre após meses de estresse e ansiedade, tropeçando em várias fases do curso e vendo amigos sucumbirem às exigências do currículo intensivo. Eu fui um dos sortudos que sobreviveu. Muito sortudo.
Em 1959, a Marinha ainda não havia desenvolvido um programa específico para treinar pilotos de helicóptero. Os pilotos “de verdade” voavam aviões. Durante o treinamento, voávamos North American T-28s e Beechcraft T-34s em um currículo completo de acrobacias, voo em formação, voo por instrumentos, navegação de longo curso e tiro, antes de passarmos para o treinamento multimotor no Beechcraft SNB (C-45) e, finalmente, para três meses de treinamento em helicóptero.
Fui então designado para o Esquadrão de Helicópteros Antissubmarino 5 (HS-5) em Quonset Point, Rhode Island, voando o Sikorsky HSS-1 Seabat. O HSS-1 de 14.000 libras (redesignado SH-34G em 1962) era um helicóptero grande para a época, equipado com um motor radial Wright R-1820 de 1.525 hp. O Wright Cyclone teve sucesso em várias aplicações em aviões da Segunda Guerra Mundial, mas não era muito confiável na série HSS, pois operava em potência máxima ou próxima dela durante quase toda uma missão de quatro horas. Um motor que durava 300 horas já era considerado de longa duração.

Em 1960, havia vários esquadrões em ambas as costas operando o HSS-1, embora apenas durante o dia e em boas condições climáticas. Táticas haviam sido desenvolvidas para operações visuais, mas não havia capacidade noturna ou em qualquer tempo porque a automação necessária para a transição completa ao voo pairado ainda não existia. Embora pudéssemos voar à noite e em condições por instrumentos, na época era impossível manter um helicóptero pairando sem contato visual.
Pairar era essencial para a missão porque o sonar AN/AQS-5 operava por meio de uma esfera transdutora que era baixada na água por um cabo. Esse cabo era limitado a uma velocidade de 5 nós na água para evitar esticar e danificar os delicados fios eletrônicos internos.
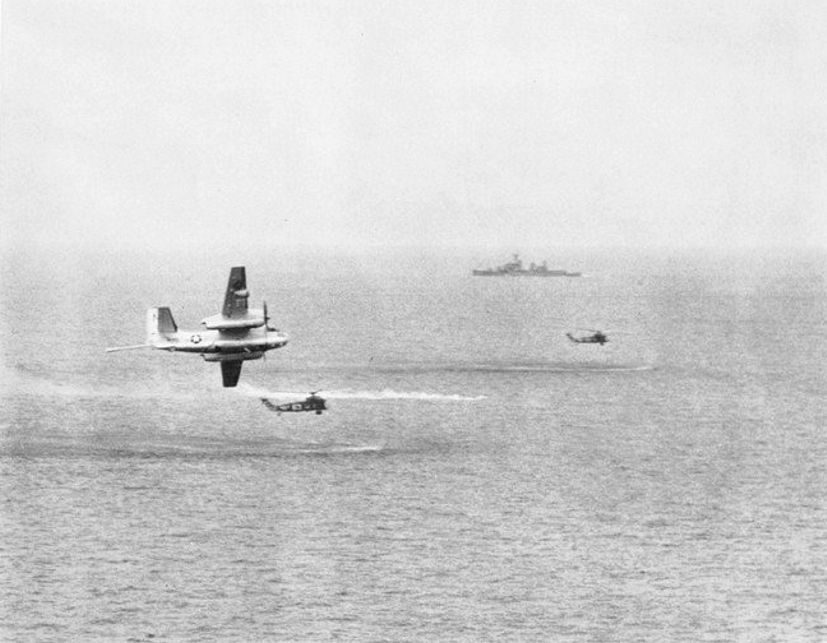
Naquela época, a ameaça de submarinos soviéticos era uma alta prioridade para a Marinha, que operava duas forças-tarefa (Alpha e Bravo) que patrulhavam o Atlântico, frequentemente dentro ou perto do GIUK Gap — os canais entre Groenlândia, Islândia e Reino Unido pelos quais todos os submarinos soviéticos precisavam passar. Cada força-tarefa era centrada em um porta-aviões classe Essex com aviões Grumman S2F e helicópteros HSS-1 operando em coordenação. Meu navio era o USS Lake Champlain, o último porta-aviões com convés reto da Marinha. A força também incluía seis contratorpedeiros e um submarino caça-submarino SSK.

Uma missão típica enviava uma formação de quatro helicópteros a uma área de referência para executar padrões de busca com sonar até a chegada de unidades de superfície com sonar mais potente. Frequentemente, os helicópteros patrulhavam à frente do porta-aviões. Também realizávamos tarefas de apoio, como transporte de pessoal e material entre navios e atuávamos como resgate durante pousos de aviões.
Um aspecto único dessa época na aviação de helicópteros era que quase não havia oficiais superiores com experiência anterior em helicópteros. Todos os oficiais superiores do HS-5 vinham de patrulhas ou outras aeronaves de asa fixa, ou dirigíveis, então os pilotos do esquadrão, independentemente da patente, tinham mais ou menos a mesma experiência. Era como estar em um esquadrão de caça dos EUA em 1917. Além disso, como os oficiais superiores lidavam com tarefas administrativas, a maioria dos voos era feita por oficiais juniores.
Então, em 1961, meu esquadrão recebeu sete HSS-1Ns (mais tarde SH-34Js) da Sikorsky, equipados com um sistema projetado para voar em qualquer clima e à noite, incluindo transição automática do voo nivelado para o voo pairado a 35 pés — um avanço notável na automação. Esses Seabats chegaram com a recomendação de serem usados apenas em condições visuais até que a Sikorsky desenvolvesse os procedimentos apropriados para voos noturnos. Vários outros esquadrões receberam os mesmos helicópteros com as mesmas instruções. A diferença no HS-5 era que nosso comandante era um piloto de testes e um líder agressivo. O Comandante Robert W. Raddatz autorizou os pilotos do esquadrão a voar o HSS-1N conforme projetado e nos assegurou que nos apoiaria, desde que não fizéssemos nada estúpido ou ilegal.
O procedimento para o qual o HSS-1N foi projetado rapidamente recebeu o apelido de “mergulho noturno” e registrávamos essas aproximações ao pairado no escuro do mesmo modo que os pilotos de aviões registravam pousos em porta-aviões. De fato, o sucessor do HS-5, o HSC-5, mantém até hoje o apelido oficial de “Night Dippers” (Mergulhadores Noturnos).
Antes de uma missão noturna típica, Bernie Woessner e eu nos reuníamos na sala de prontidão com outras três tripulações. Woessner era um ex-oficial da marinha mercante, excelente piloto e bom amigo, embora de poucas palavras. Uma conversa com ele muitas vezes não passava de uma longa pausa seguida de um “É”. Quase 60 anos depois, ainda somos amigos.

Ken Cluckey, nosso operador de sonar, era excelente no que fazia, mas tinha um lado travesso. Seu passatempo era esperar até a última chamada no sábado à noite, pedir mais uma cerveja e morder a bartender. Não forte, mas uma mordida que o levava para a detenção por uma noite. Na segunda de manhã ele se desculpava: “Sr. Manningham, me desculpe. Mordi outra bartender.” Mas então, com um sorriso, acrescentava: “Essa foi a número 28!” Cluckey se orgulhava secretamente do total. E eu não ligava. Ele podia morder à vontade, desde que continuasse tendo os melhores ouvidos de sonar da frota do Atlântico. Na aeronave, ele era excepcional. A Tripulação 16 era pouco convencional, mas muitas vezes eficaz.
As decolagens noturnas podiam ser tensas se nosso helicóptero estivesse próximo à ilha do porta-aviões ou perto de aviões estacionados — o que era comum. A folga do rotor era mínima, a visibilidade muito limitada e era essencial sair do convés com desvio de qualquer obstáculo. Em clima quente, o desempenho era limitado porque sempre decolávamos no peso máximo.
A transição para a área de busca era guiada por vetores de radar, pois não tínhamos meios de navegação além da estimativa visual (dead reckoning). A navegação era feita com lápis de cera sobre uma prancheta plástica, com auxílio ocasional de vetores de radar de navios de superfície. Na área de referência, a formação se dispersava e iniciava uma busca em quatro vetores independentes de bússola, e o mergulho começava.
A noite no Atlântico Norte era escura, completamente escura. Estávamos isolados porque havia comunicação limitada ou nenhuma com o navio. E fazia um frio amargo por dois motivos: a temperatura ambiente e o fato de voarmos com as janelas laterais da cabine abertas, pois uma pane no motor a baixa altitude não permitiria tempo suficiente para abri-las para escapar. Usávamos trajes de sobrevivência (“poopy suits”) que nos dariam no máximo uma hora de vida na água ártica, mas eram volumosos e incômodos.
Para iniciar o procedimento de mergulho, eu (ou Woessner, se ele estivesse pilotando) estabilizava o helicóptero a 130 pés de altitude e cerca de 70 nós de velocidade, voando com o sistema automático de estabilização (ASE), um autopiloto primitivo. Ajustávamos o controle da mistura para “rico” por causa da potência exigida no pairado e checávamos os instrumentos do R-1820.
Para iniciar a transição automática ao pairado, o copiloto apertava dois botões verdes no console central, e o restante era automático. O helicóptero descia guiado por sensores doppler e altímetro de radar. O sistema doppler não era muito preciso e o altímetro usava as ondas como referência, então o helicóptero balançava e oscilava sobre a superfície e o acelerador variava com as ondas. Era uma descida instável, com muita vibração, até os 35 pés. Ao perder sustentação translacional — por volta dos 30 nós — o painel sacudia tanto que ficava ilegível, no momento mais crítico da aproximação.
Aos 35 pés, eu dizia a Cluckey: “Desce a bola”, e ele iniciava a descida do transdutor. Quando a bola descia 20 ou 30 pés, Woessner mudava o controle lateral de “Doppler” para “Cabo”, resultando em um pairado imediatamente estável. Após a bola entrar na água, o modo de altitude podia ser trocado de “RadAlt” para “Cabo”, com efeito estabilizador semelhante.

Quando tudo funcionava, era maravilhoso — mas lembre-se, isso era equipamento de válvula a vácuo dos anos 1960. Havia várias falhas possíveis, cada uma causando sustos, sem falar no risco de vertigem. Numa missão, Woessner disse no momento crítico: “Assume, estou com vertigem.” Peguei os controles, mas também fiquei tonto ao olhar o painel, então travamos o cíclico, puxamos o coletivo até as axilas, subimos algumas centenas de pés e conseguimos estabilizar o voo. Depois tentamos tudo de novo.
Quando conseguíamos estabilizar no pairado, Cluckey iniciava a varredura do sonar com um equipamento primitivo pelos padrões atuais. O AN/AQS-5 era um sonar “refletor”, que cobria apenas um arco de 10 graus. Cluckey precisava fazer 36 varreduras separadas usando apenas a audição, pois não havia display visual. Ele ouvia ruídos na água ou o eco de um “ping” ativo. Uma varredura completa levava pelo menos cinco minutos. O alcance máximo era de cerca de 3.000 jardas.

Ao completar a varredura, se não houvesse contato, ele recolhia a bola e voávamos manualmente para longe do pairado até uma altitude segura. Depois seguíamos para o próximo ponto de busca e repetíamos… e repetíamos. Essa era a rotina da guerra antissubmarino (ASW): como procurar uma aliança de casamento perdida no gramado enquanto você cortava a grama. Mas Cluckey era muito bom. Às vezes achávamos o “anel de ouro” e então iniciávamos uma perseguição total usando todos os meios aéreos e navais, com o objetivo de forçar o submarino a emergir.
O último elemento que precisava ser redefinido para voo noturno/por instrumentos era a autorrotação em caso de pane no motor. No escuro sobre o oceano, não havia referência visual para a manobra final de frenagem e pouso. Então a Sikorsky desenvolveu um procedimento com quatro passos: abaixar o coletivo, virar contra o vento, reduzir para 30 nós e, a 50 pés no altímetro de radar, puxar o coletivo e torcer para dar certo — tudo isso em menos de um minuto. O HS-5 perdeu dois helicópteros praticando essa manobra, um em terra e outro no mar.
Desde aqueles primeiros dias desenvolvendo operações de helicóptero antissubmarino em qualquer clima e a qualquer hora, o HS-5 evoluiu para o Esquadrão de Combate Marítimo de Helicópteros 5 (HSC-5), parte do Carrier Air Wing 7, baseado em Norfolk, Virgínia. O HSC-5 tem uma missão muito mais abrangente, que ainda inclui os mergulhos noturnos com sonar.
Por que tudo isso importa? Porque um punhado de jovens pilotos e técnicos, sob comando de um oficial confiante e competente, arriscou a vida para estabelecer procedimentos que hoje são padrão mundial. Porque conflitos internacionais acontecem. Porque submarinos são uma ameaça crescente e a guerra antissubmarino com helicópteros tem uma herança distinta que começou há 60 anos.
* Dan Manningham passou 45 anos voando ativamente, incluindo cinco anos na Marinha e 33 anos na United Airlines. É autor de três livros e de cerca de 500 artigos para pilotos profissionais. Leitura adicional: Sikorsky H-34: An Illustrated History, de Lennart Lundh.
FONTE: history.net
O post Foi assim que começou a guerra antissubmarino noturna apareceu primeiro em Poder Naval.

